相机标称的动态范围是物理极限,你真正能交付的那部分要小上若干档——差额由降噪的代价决定。
那个「14 档」到底骗没骗你#
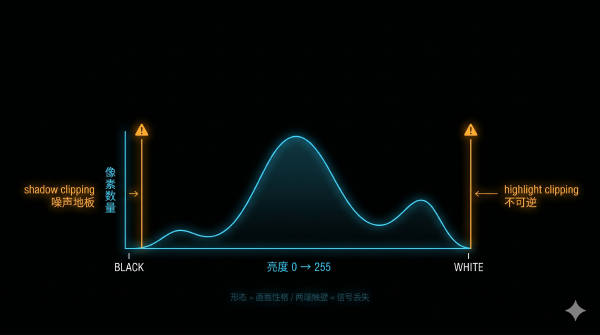
傍晚逆光拍人,天空和人脸差了好几档光。你按着人脸测光,回家一看天空白成一片;这次保住天空,人脸又黑成剪影。你想起参数表上写着「14 档动态范围」——一张照片从最亮到最暗能装下 14 档明暗,这个场景的光比明明没到 14 档,怎么还是顾此失彼?
不死心,把人脸那块暗部往上一拉,细节是回来一点,可满屏都是彩色噪点;再降噪压一下,人脸又糊得像打了层蜡。问题到底出在哪?
其实「14 档」这个数字没骗你,但它说的不是你以为的那件事。相机能「记录到」14 档,和你「能用」几档,是两个不同的口径——中间差掉的那几档,正是这篇要讲清楚的东西。
动态范围量的是「从白到黑能塞几层」#
先说清楚动态范围到底在量什么。
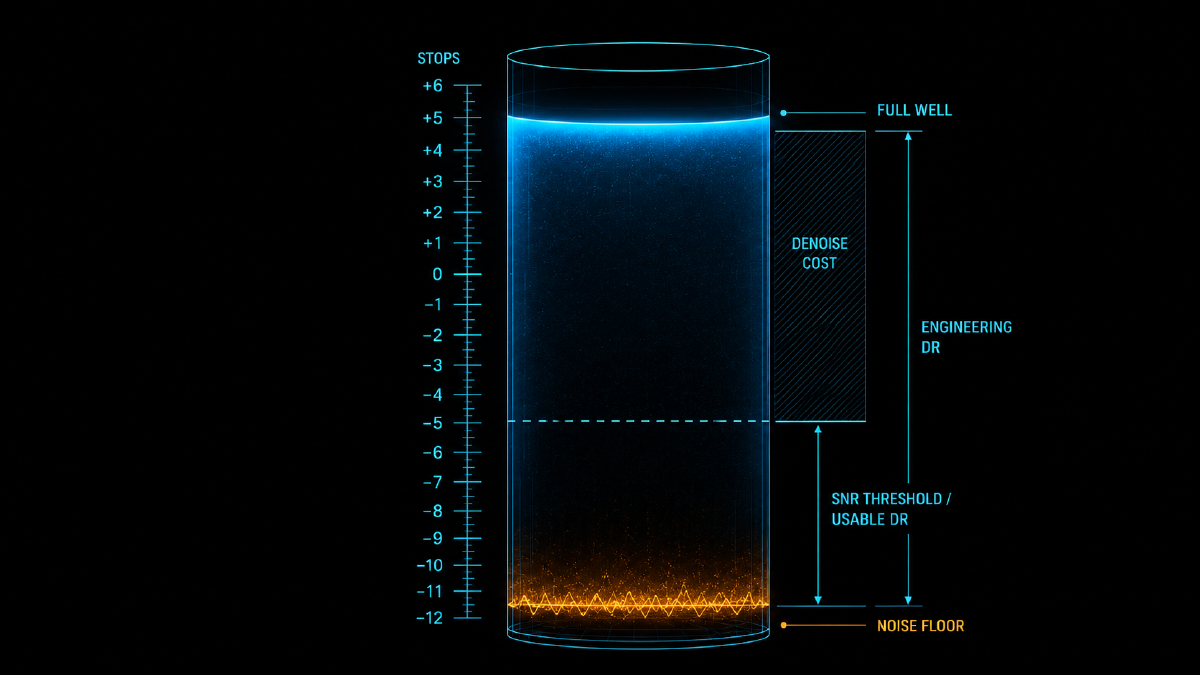
把传感器想成一个有刻度的水桶。光子像水,曝光就是往桶里灌水。桶灌满了再灌就溢出来——这是桶的上沿,对应高光过曝、纯白一片,是它能容纳的最大信号。但桶底不是干净的,永远晃着一层浑水:那是传感器在没光、或接近没光时也甩不掉的电子噪声——读出电路的 read noise、暗电流噪声、量化误差垫在最底下,高度大体固定,不随你收多少光变化。我们在 #1-8 把这条线叫作噪声地板(noise floor)。比它还浅的信号,你分不清哪是真画面、哪是噪点。
(那光子本身的随机涨落 shot noise 呢?它是另一回事:随信号变强而变大,但信噪比同时按光子数的平方根往上走——所以它决定的是中间调和暗部「够不够干净」,而不是垫死最底那条线;越往暗处走,它的绝对值反而越小。这条 #1-8 推过。)
动态范围(Dynamic Range,DR),量的就是这个桶「上沿」到「浑水面」之间的高度,单位是档(stop)——每多一档,信号翻一倍。一只满阱容量(full well capacity,溢出前能装下的最大电子数)大、噪声地板又低的桶,能塞下的明暗层次自然多。
动态范围量的不是「最亮」也不是「最暗」,而是这两端之间还能分辨出多少层次。
「14 档」是物理极限:工程 DR#
那参数表上那个数字是怎么来的?
参数表、评测站和传感器测试里报的那个 DR,多半是工程口径的动态范围。它的定义很干脆——最大不溢出信号,除以噪声地板:
$$ \text{工程 DR (stop)} = \log_2 \frac{\text{full well capacity(满阱容量)}}{\text{noise floor(噪声地板)}} $$分子是桶满之前能收的最大信号,分母是浑水面的高度,两者之比换算成档数,就是「这块传感器从溢出到刚好淹进噪声里,理论上跨多少档」。这是个物理极限,一台机器出厂就定死了:base ISO(厂商标定的最低噪声工作点)下最高。往上抬 ISO,可记录的高光余量被压窄——满阱容量是固定的,但增益把信号放大后更早撞上 ADC 顶格,亮端先丢,DR 因此变小(至于噪声地板那一端,随 ISO 不一定单调上升,有些传感器在某些档位 read noise 反而下降,尤其带双增益结构的,这条 #1-8 聊过)。
这里要提一句:同样叫 DR,DxOMark 的 Landscape DR、Photons to Photos 的 PDR、厂商宣传册、视频机标的 stops,用的 SNR 阈值和归一化规则各不相同(屏幕归一化 vs 打印归一化就能差出小半档)。所以别拿不同来源的数字硬比,更别把某个评测值当成厂商承诺。
但这里有个坑。工程 DR 最暗的那一两档,是「刚好能从噪声里分辨出来」的信号——分辨得出,不等于好看。那几档暗部,信号只比浑水高出一点点,信噪比低得可怜,放大了看全是噪点。相机确实「记录到」了它,可你未必「用得上」它。
工程 DR 回答的是「传感器最多能记录多少档」,是物理上限,不是你能交付的画质。
能记录 ≠ 能用:可用 DR 与那条代价函数#
那我到底能用几档?这就引出第二个口径——可用 DR(Usable DR)。
它不看「能不能记录」,只看「信噪比够不够好看」:从最亮端往下数,只要某一档的信噪比(SNR)还在你能接受的阈值以上,就算进可用范围;一旦掉到阈值以下——暗部噪点多到硌眼——就不算了。所以可用 DR 永远小于工程 DR。
这个阈值能粗略量化:SNR ≈ 1 只是「勉强能从噪声里认出有个东西」,那正是工程 DR 的下沿;要看着干净,暗部得到 SNR ≈ 10;要经得起放大细看,往往要 SNR ≈ 20 以上。可用 DR,就是从高光端往下数到「信噪比还在你这次用途的及格线以上」为止的那一段。
而这个「及格线」本身还是浮动的。发张手机小图,暗部糊点噪点没人凑近看,阈值低,可用 DR 就宽;要放大打印挂墙上、站近了端详,阈值高,可用 DR 就窄。同一台相机、同一张 RAW,输出目标不同,能用的档数就不一样。
那中间差掉的那一段(常见两档上下,但不是定数)去哪了?没消失,是被一道「代价」挡在了门外。工程 DR 记录到的那些暗部,你想把它救进可用范围,唯一的办法是后期把暗部提亮——shadow push。可 push 是事后的数字增益,它放大信号的同时,把垫在底下的噪声一起放大了。提得越多,噪点越凶;噪点凶了就得降噪,而降噪是拿细节换干净——降噪算法分不清「皮肤纹理」和「噪点」,常常一并抹平。
于是有一条代价函数(cost function)摆在这儿:
暗部每多救一档 → push 越狠 → 噪声越大 → 降噪越重 → 细节损失越多。
可用 DR 的边界,就是这条代价曲线上「还划算」的那个点。过了那个点,救回来的暗部还不如不救。
所以可以这样收束这两个口径:工程 DR 是相机给的物理极限,可用 DR 是你在「细节损失能接受」前提下真正能交付的范围,中间隔着一条降噪的代价函数。
与其事后救,不如拍摄时给暗部喂光#
知道差额卡在哪,拍摄时就有了对策。
暗部之所以难救,根子是它离噪声地板太近、信噪比太低。那最省事的办法,不是事后拼命 push,而是拍摄时就让暗部多收点光,把它从浑水面往上抬——信号一高,信噪比自然跟着涨,根本不用后期硬拉。
怎么抬?在不溢出高光的前提下,曝光尽量往右偏(直方图右侧,我们在 #1-6 聊过那条「向右曝光」的物理直觉:暗部往右一档 ≈ 多收一倍光子,信噪比开着方往上走)。同样是一档曝光,拍摄时喂进去的是真光子,事后 push 放大的是已经掺了噪声的信号——前者干净得多。不过向右不是无脑加曝光:加之前先看 RAW 的高光警告 / 斑马纹 / 回放,确认重要高光(尤其肤色、天空、金属反光)还没顶格。这套思路系统化之后就是 ETTR 策略,#1-14 会专门讲它的触发条件和翻车场景。
还有一个常被说拧的点要拎清楚:真正让画面干净的是「多收了光」,不是「ISO 调低了」。如果你能放慢快门、开大光圈或补光,把真实进光量加上去(高光不溢出),那低 ISO + 充分曝光肯定赢过欠曝再 push。但要是进光量根本加不了、只是把 ISO 往下拨然后靠后期提亮,结果就不一定了——在读出噪声占主导的场景里,机内高 ISO 增益反而可能更干净;只有当传感器接近 ISO 不变性(ISO invariance)时,机内提 ISO 和后期 push 才大致等价。这些传感器架构的细节 #1-8 拆过。

当然,向右曝光的前提是高光别溢出——高光那一端为什么比暗部更「救不回来」,是另一个故事,留给 #1-10。还有一种情况:场景本身的光比就超过了你单张能用的 DR(比如室内对着窗外的大太阳),那不是曝光策略能解决的,得靠包围曝光加 HDR 合成把多张拼起来,那是 #1-16 的活。
可用 DR 不够时,第一选择是拍摄端把暗部喂饱,而不是后期端硬救。
拍摄行动点#
- 找一张你拍过的逆光或大光比 RAW,把阴影滑块拉到 +60 以上,100% 放大看暗部——记住噪点炸开的那个临界点,那就是这台机器在这个 ISO 下「可用 DR」的实际下沿。
- 同一个大光比场景拍两张:一张按相机建议曝光,一张在不溢出高光的前提下增加 2/3 到 1 档曝光(向右)。后期都把整体影调调到一致,再对比暗部噪点——你会直观看到「拍摄时喂光」比「事后 push」干净多少。
- 把同一张 RAW 分别导出成手机分享尺寸和打印尺寸,各自调到「暗部噪点可接受」为止,记下两次你愿意把阴影拉到多亮——这两条不同的界限,就是可用 DR 随输出目标浮动的活证据。
写在最后#
读这篇之前,「动态范围 14 档」大概只是参数表上一个用来比高低的卖点数字。现在你应该能把它拆成两件事:工程 DR 是传感器从溢出到淹没的物理极限,可用 DR 是你在细节损失能接受的前提下真正能交付的那一段。两者之间总隔着一段差距:常见在 2 档上下,但它不是定数,会随相机、ISO、输出尺寸、观看距离和降噪强度浮动。那段差距,就是降噪代价函数收走的过路费。想通这点,曝光决策的重心就从「事后能不能救回来」挪到了「拍摄时把光喂到哪里」。
不过我们这一篇一直默认暗部和高光是对称的:都是离边界越近越糟。其实不是。暗部噪点至少还能靠多收光、靠降噪挣扎一下;高光一旦溢出,那是连数据都没留下,神仙难救。为什么高光这么「不可逆」,又为什么常常是某一个颜色通道先爆、连带把肤色和天空搞坏?下一篇 #1-10 接着聊。
参考资料#
- DxOMark,Dynamic Range 测量方法说明(landscape / 打印归一化口径)
- Bill Claff,Photons to Photos——各机型传感器 PDR(Photographic Dynamic Range)实测数据库
- Emil Martinec,Noise, Dynamic Range and Bit Depth in Digital SLRs